Marisa Warner: The Set Up and Foundation of the Husky
| Attachment | Size |
|---|---|
| 9.39 MB | |
| 359.34 KB |
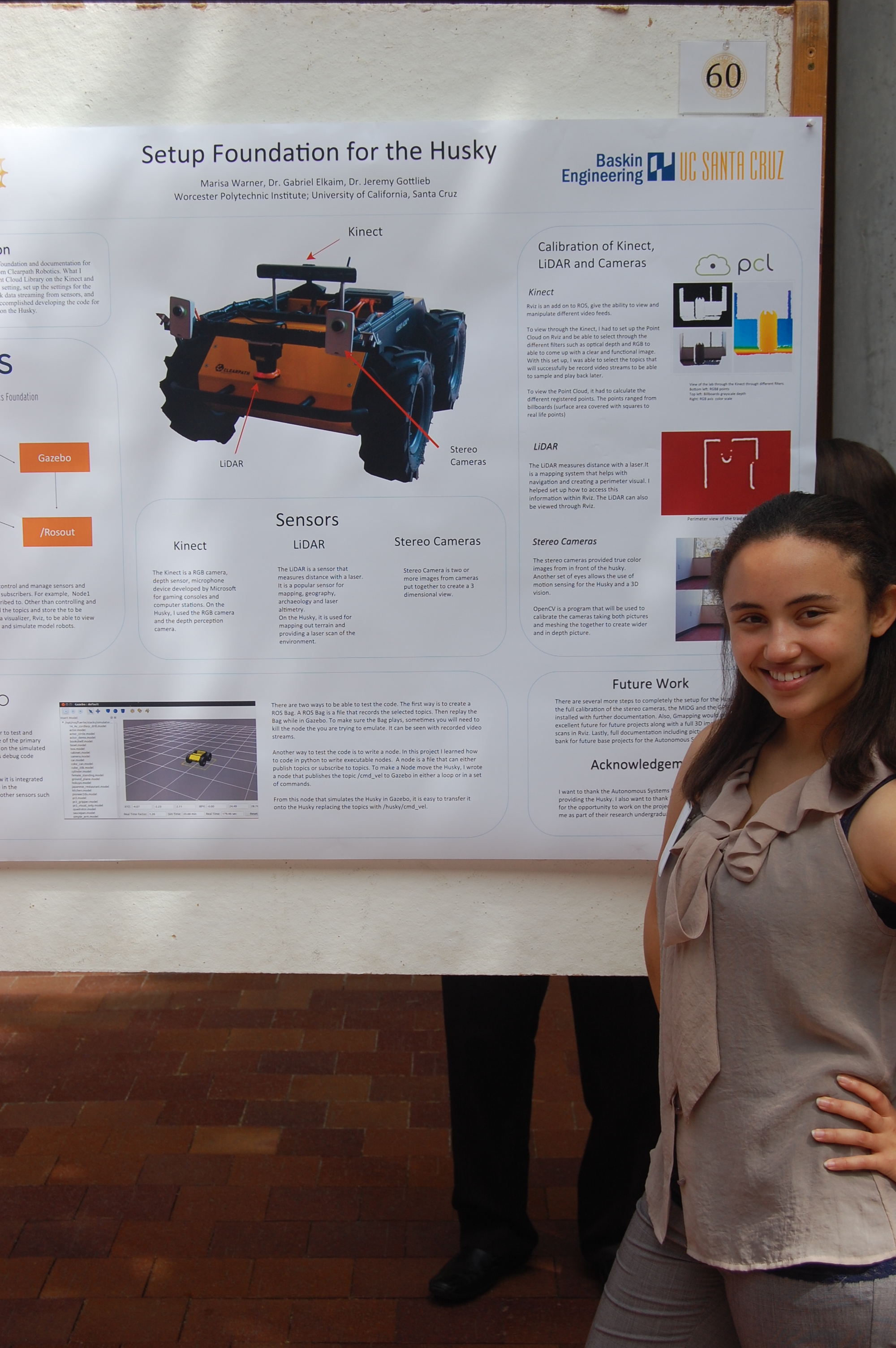
Clearpath’s Husky A200 is an unmanned ground vehicle that UCSC’s Autonomous Systems Lab acquired to provide a vehicle base for future projects. The purpose of this project is to establish a foundation and documentation for the Husky and calibrate the sensors on board the Husky. We set up a system with the Point Cloud Library to view the Kinect and LiDAR video streams in Rviz. With that, we figured out a way to record and play back the sensor data using a built-in feature in ROS. ROS stands for Robot Operating System. It is used to manage individual components in a robotic system to acquired data and to allow communication between each sensor. We also set up how to visualize and control the Husky in a simulator Gazebo. Gazebo is also a built-in ROS feature that creates an environment that allows real world interaction with the robot. With these tools and features, we were able to translate the simulation to the Husky and created a basic autonomous control for future projects with the Husky.